
O atuador é uma ferramenta barata e pesados com torque suficiente alta, ideal para sistemas de elevação, mas na prática ele precisa muito esforço, a fim de funcionar corretamente em seu sistema de antena homebrew.
Esta página vai tentar informá-lo dos segredos do atuador.
Fig. 1
Existem vários modelos de atuadores TVRO no mercado. Eles têm diferenças no "comprimento" e da tensão de alimentação. Depender do fabricante, a maioria dos modelos são entre 8 - 36 "(polegadas).


A foto acima (fig. 2) mostra as dimensões de 12 "atuador e os seguintes" animação "(fig. 3) mostra como ele funciona.

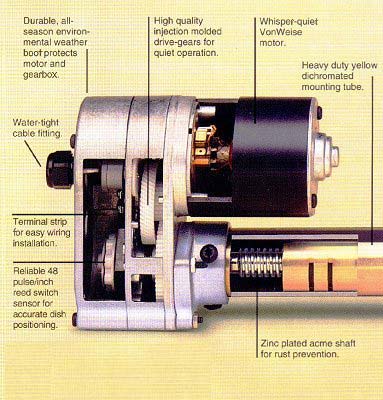
Como eu disse antes, o atuador inclui um motor DC, uma caixa de engrenagens ea wormscrew final, a fim de transformar a rodada do motor no acionamento linear. Assim, quando esse é alimentado com polaridade normal de tensão DC, o comprimento do atuador se expande (" seção "amarelo como mostrado na fig.4). Ao fornecer o motor com "inversão de polaridade", "comprimento" do atuador reduz.


Para operar o motor precisa de 12-36 Volts, dependia do modelo. Eu uso um modelo de 36V. Dessa forma eu conseguir menores corrente no cabo de alimentação entre barraco e uma antena (ver detalhes abaixo em "Tensão").
Por outro lado, os motores dos atuadores são muito sensíveis ... no meu sistema com apenas 12 V (0,25 A) a elevação se move muito lento. Isso é muito útil para pequenas correções de ângulo de elevação, a operação especialmente útil para HEO satélites, quando estes está perto de apogeu.Com 36 V de fornecimento a elevação está se movendo mais rápido, ou seja, se você precisa de uma mudança rápida entre 00-90 °. Na prática, eu não fornecem o meu atuador com tensão máxima (36V). Estou usando o intervalo 12-24 V.
"Dentro de mundo" da Qualidade Hi-atuador TVRO.
Atuadores precisa de uma fonte de tensão entre 12-36 V, dependia do modelo. Se o seu atuador é de 12 V, você pode alimentá-lo que a partir de sua base de alimentação (13,8 V) para o barracão.
Mas, quando atuador "transforma-on", a demanda de energia é muito alto. Estes forte "corrente picos" durante ponto de partida o atuador é um problema e, por vezes, o valor de "pico" de corrente elétrica é 5-10 vezes maior do corrente normal de consumo.
A fim de proteger o "On-Off" switch, o motor e, especialmente, a fonte de alimentação de "Over atual" (curto-circuito) proteção, que normalmente é ativado por esses picos de corrente, podemos adicionar uma lâmpada em série com cabo positivo e, assim, limitar a corrente. Dessa forma, a "corrente de pico" diminui. Na prática, o LP está agindo como um simples "Soft-Start" do circuito.
Qualquer carro Lamp-acima de 5 W é OK para isso, dependem do atuador atual. Alguns atuadores têm um consumo bastante alta corrente (até 2A), de modo que o "pico de corrente" pode ser até 10-20 A!
Neste caso, você precisa de uma lâmpada com corrente mais alta.
Se você não pode calcular a potência da lâmpada, basta seguir este método simples:
ligar a lâmpada início a partir de 5 W. .. se a lâmpada está sendo acesa no início e então ela apaga lentamente, é OK. Se a luz da lâmpada continua durante o movimento do atuador e permanece estável, você precisa de uma lâmpada de maior potência. Mas tenha em mente que W 5 é um mero exemplo. Potência da lâmpada depende do consumo atual do atuador, a tensão de alimentação etc A lâmpada de "5 W" não é uma regra para todos os modelos.
Além disso, a tensão da lâmpada depende da fonte de tensão do atuador. Uso por 12 Atuador V 6-12 V lâmpada. Uso por 24 V 12 - 24V lâmpada.


Fig.5 mostra um circuito bastante simples, que manipula os 12V atuador TVRO para "Up" e operação manual "Down".
S1 é um duplo ON-OFF-ON botão interruptor. Na posição central, é normal - OFF. Os outros contatos são usados para "UP" e "Down".Empurrando S1 para "Up", polaridade normal é alimentado ao motor do atuador através do cabo de alimentação. Neste caso, o atuador se expande e aumenta a elevação.
Inversamente, quando o S1 é empurrado para "Down", motor do atuador é fornecido com inversão de polaridade. Assim, o comprimento do atuador diminui.

Fig.6 acima mostra um outro circuito para "Up-Down" de controle com relés. Este circuito permite o controle manual ou remota do atuador.
Pressionando B1, B2 botões nós temos o controle manual do sistema de elevação.
Remoting controle é possível se o ponto A ou B é aterrado através de um coletor "aberto" (emissor aterrado) driver transistor, que é acionado a partir de alguns circuitos apropriados electrónica (ver FodTrack ou similar).
Por exemplo, Se o ponto "A" está aterrada, RL1 é ativado e motor do atuador é fornecido com polaridade normal. Assim, a elevação é crescente.
O oposto acontece se o ponto B é aterrado (RL2 ativa).
"D" é um diodo de silício habitual, como 1N4003, 1N4004, etc
Tenha em mente que, o circuito tem proteção através de relés contatores para a operação manual, então se o RL1 está em funcionamento, RL2 não pode ser ativada eo oposto (RL2 em operação, RL1 não pode ativado). Assim, se por qualquer acidente for pressionado a B1 e B2 botões ao mesmo tempo, somente um relé está sendo ativado.
Que, é absolutamente necessário em operação manual. Caso contrário, se ambos os botões forem pressionados ao mesmo tempo e os dois relés ativados simultaneamente, haverá como resultado um "curto-circuito" entre o positivo eo negativo da fonte de alimentação!
O "controle remoto" capacidade deste circuito é útil para o controle externo do atuador através de um programa de rastreamento por satélite. Por exemplo, com FODTRACK PCB e este relé circuito é possível conduzir qualquer atuador. (Fodtrack conector: pin3 para "A" pin e 5 a "B")
A taxa de tensão de 5V + (na prática, 5-6 V) é apenas um exemplo. Neste caso, o RL1 - RL2 são para 6V DC. Certamente, qualquer relé com tensão diferente, ou seja, 12 V DC pode ser usado sem qualquer problema e que depende da tensão de alimentação do sistema de circuito de elevação.
Geralmente, qualquer combinação ou modificação é possível, porque o circuito é simples e flexível.
A combinação com a lâmpada (LP), conforme descrito acima para "Iniciando Soft" é simples, eficiente e eficaz. Mas se você quer um método mais sofisticado, ou o seu atuador não é de 12 V, então é necessário para você usar uma fonte de alimentação independentes.
Fig.7 mostra uma fonte de alimentação simples para a alimentação do atuador, com LM317T IC-regulador.
O LM317 tem uma grande vantagem para esta aplicação, porque inclui corrente interna-Limitador! Assim, a corrente máxima permitida em-produção é de até 1,5 ampères (para LM317T). Desta forma, o LP não é necessário. Além disso, o LM317 oferece saída de tensão variável (ajustada por P1) e é capaz de fornecer qualquer modelo de atuador, entre 12-36 volts e consumo de corrente máximo até 1-1,2 Amp.
Geralmente, o LM317T é um regulador ajustável terminal 3 positiva capaz de fornecer em excesso de 1,5 ampères durante um intervalo de saída entre 1,2-37 Volts. Também tem built-in limitador de corrente e desligamento térmico. O "Input" tensão deve ser maior Volts 04/03 (ou mais) do que a "saída" de tensão, mas não deve exceder os 40 Volts (= entrada máxima). Tensão de saída é definido pelo resistor divisor de R1, R2 (onde R2 = R + P1 em Fig.7).
A tensão de saída pode ser aproximadamente calculada pela seguinte fórmula:
Porque eu tenho usado como R2 uma combinação com pot (P1) e resistor estável (R) o divisor é variável semi, a fim de ter saída variável entre 8-14 ou 12-24 Output Volts (ver Fig.7 para obter detalhes sobre P1 e valores R).
A única necessidade é que: o "Input" Tensão (Pin 1 ou através C1) deve ser Volts 04/03 maior do que a "saída" de tensão, mas lembre-se: no máximo "Input" tensão para LM317T = 40 V.
Assim, para saída de 24 V, é necessário uma tensão de entrada 27-28 V (pino 1 do LM317). Saída para 12 Volts, 15-16 V Input. Portanto, tenha em mente, o secundário de TR1 deve ser selecionado com esse pressuposto e, claro, o poder transformador deve ser grande o suficiente para manter o "Input Voltage" Volts 04/03 acima da saída em plena carga.
Este circuito tem um cuidado adicional contra transientes.
Como você sabe, qualquer motor, assim, que inclui o atuador, é um muito, muito "Load Bad" para circuitos eletrônicos. Além disso, temos um longo cabo de alimentação entre a fonte de alimentação e do atuador, geralmente com efeito indutor indesejados. Assim, a fim de operar o LM317, sem problemas, é necessário o diodo D, o DZ Zener, o C3 cap & the FB ferrite. Estes componentes evitar transientes indesejáveis, "Peaks", etc e finalmente ajudar o regulador LM317 para operar com estabilidade.
O diodo zener DZ deve ser cerca de 4-5 Volts maior da tensão de saída máxima. Por exemplo, se o atuador é alimentado com 12 V, então DZ = 16 V / 1W. Se o seu atuador é alimentado com 36 V, DZ = 40 V, etc
(Este diodo Zener não é "Over-Voltage" proteção na saída do LM317. É trabalhar, a fim de evitar qualquer tensão pico-ou transitórios da alimentação de cabo-a-LM317 (caminho inverso). Assim, o circuito LM317 está protegido contra a "faíscas" qualquer atuador-motor).
Usando este circuito que você tem outro benefício:
a variável da tensão de saída através P1 ajuda o Atuador para operar com velocidade variável. Assim, se a tensão é a redução, é possível ter "câmera lenta" do sistema de elevador, para pequenas correções do ângulo de elevação.


Saída 8-13,8 Volts
R = 1K2
P1 = 1K
Saída 11,5-24 Volts
R = 1K8
P1 = 2K2
R = 1K2
P1 = 1K
Saída 11,5-24 Volts
R = 1K8
P1 = 2K2
Finalmente, lembre-se que cerca de LM317T: o Pin 2 tem conexão interna com corpo de metal do caso (TO-220). Então, só tome cuidado se você colocar um Hotsink em IC-corpo! Ele deve ser "isolado" do Negativo (GND). Caso contrário, a "saída" do LM317 vai ser conectado no chão (= curto-circuito!) Através Hotsink, se for aterrada.
Este PS tem funcionamento intermitente para suppling atuador com baixo ciclo de trabalho. Assim, se o consumo de seu atuador é abaixo de 0,3 Amps, não há nenhuma necessidade de Hotsink. Se a corrente é maior do que 0,3 ampères, um Hotsink pequena ajuda o LM317.
No caso do seu atuador tem maior consumo de corrente, isto é, entre 1-2 ampères, é possível substituir o LM317T com o LM350T.
O LM350T tem o mesmo caso (TO-220) e características com LM317, mas a corrente máxima de saída é de até 3 ampères (e em qualquer caso, exigia um Hotsink).
Os atuadores têm dois ajustável limitar-switches (tampa) dentro da tampa inferior da caixa de engrenagens. Assim, você pode ajustar o superior(90 °) eo limite inferior (0 °), a fim de proteger as partes mecânica do sistema de elevação a partir de qualquer possível dano (suporte está quebrado, etc).
Qualquer dano é possível se o atuador move as peças mecânicas acima do limite.
Fig 8 - Vista inferior da caica de velocidades atuador.
Utilizando os parâmetros de limite, o sistema de elevação vai se move entre 00-90 ângulo, de forma segura.
Por exemplo, quando o atuador vai para a limitação superior ou inferior, o interruptor de limite "corta-off" tensão de alimentação do motor. Então, você deve inverter a polaridade de tensão, de modo que ele se mova novamente (inversamente).

(Eu tenho aqui um arquivo PDF-85KB {} da folha de meu atuador de instruções. Dê uma olhada.)
Recebi um e-mail, que mencionou um atuador sem "Limite-switches". Eu não tenho idéia sobre isso, todos os atuadores que eu sei que tem "Limite-switches" da fabricante. Se você tem atuador sem opções, você pode adicionar um par de externa, a fim de proteger o seu sistema de elevação de possíveis danos.
Tenha em mente: o ângulo de elevação de 00-90 °, que oferece um sistema com atuador, é na prática, uma desvantagem em comparação com um sistema de elevação rotador, que pode oferecer 0-180 arco ° (que o nome "Modo de Flip-") .
Assim, se a passagem do satélite é a sobrecarga, o sistema de elevação com atuador não pode seguir o satélite continuamente, dentro do arco de 00-90 ° -180 °, entre AOS - TCA - LOS!
Em primeiro lugar, a elevação deve ser aumentada 00-90 ° e, em seguida, ele deve ser rodado o azimute 180-rotor ° (no rolamento oposta). Então, o atuador normalmente diminui a elevação 90-0 º ... com esta combinação que podemos seguir o satélite na passagem aérea. Este problema não existe com double-rotador, mas em satélites LEO a maioria das órbitas não são "overhead", por isso não importa!
Na prática, o arco, que oferece um sistema com atuador e canto dobradiça * (* ver foto abaixo) é mais do que 90 °. Podemos passar a elevação até 135 °, mas em todo caso, isso não é suficiente para "overhead" passes.
Teoricamente possibilidade de cobrir o arco 0-90-180 ° continuamente, existe usando o sistema de haste (como motor de carro), mas a construção é muito mais complicado .... na prática é desnecessária para 1-2% dos passes, que é "overhead" (exatamente 90 ° de elevação).
Os atuadores incluem um ILS eo axial do motor tem um ímã de cabeça. Desta forma, um número de pulsos durante a atuação são gerados.Geralmente, os atuadores usual TVRO gerar cerca de 48 pulsos por polegada.
Receptores de TV por satélite tem a capacidade de medir estes pulsos. Convertê-los em graus, a elevação é mostrada no painel frontal do receptor sáb
Infelizmente, em nossos sistemas homebrew que não é muito fácil de conseguir! A maioria dos programas de rastreamento SAT-necessidade de tensão variável (e não pulsos!), A fim de ler a "posição" de Elevation sistema. Então, aqui temos um pequeno problema com atuadores!
Eu fiz uma digital-contador para isso, mas na prática é muito mais complicado. Talvez a solução mais fácil é usando um PIC ou carimbo trabalhando como decodificador, mas eu não sou um programador, eu não posso fazer isso.
Então, se você quiser fazer um sistema com rastreamento automático de um Software Satellite, eu sugiro a solução usual simples:
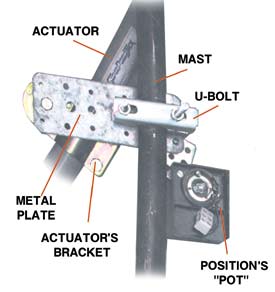
um potenciômetro perto de peças de elevação,
que está se movendo em sintonia com a elevação do braço.
Existem várias combinações, a fim de o casal Elevation suporte com um potenciômetro para a posição de leitura. Por exemplo, use um peso pequeno em um pote com um braço e deixar a gravidade dar-lhe a referência zero.
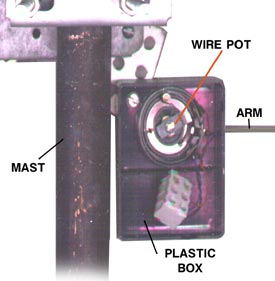
A "pesca-line" também é muito útil para este trabalho. Usando pequena pesca peso (chumbada), a pesca de linha e uma pequena roda no eixo do potenciômetro, desta forma, é possível converter facilmente os graus de elevação de tensão variável.
Em outras palavras, quando a elevação sobe ou desce, a pesca de linha-vira para a direita ou esquerda do volante e, assim, move-se o corredor de potenciômetro.
Alguns relatórios disseram que: a roda é muito raro ... Acho que não. Você pode encontrar este a partir de rádios antigos. A roda estava no capacitor variável, assim você já pode ter uma, em seu "junk-box"!
Outra técnica mais sofisticada é mostrado na figura seguinte (que é de Internet, mas muito triste, não me lembro a URL)

Este método usa um pequeno "redutor", provavelmente de algum brinquedo infantil, a fim de reduzir a rotação do motor ... Desta forma é possível usar para ler-out um pote multiturn em caixa atuador. Muito inteligente, mas sempre parece difícil encontrar um redutor-assim.
Fig.9 abaixo mostra um diagrama de leitura simples para sistemas de elevação. Usando o P1, como descrito acima, é possível ler o ângulo de elevação através de M1 em graus, que se calibrada corretamente, com excelente resolução (1 °). A "linha vermelha" na Fig.9 mostra a seção "fora".Na prática, que é um double-cabo (ou seja, 2 x 0,5 mm) e do potenciômetro P1, que é acoplado a qualquer parte mecânica móvel de elevação.
P1 e P2 são 5 KOhms linear pot e KOhm = 10 P3, também pot linear. P2 e P3 deve ser multiturn panela, a fim de ajustar facilmente o "Low" e "superior" limites.
M1 não é crítico ... qualquer bobina metros entre 0,1-1 mA está funcionando bem.
Tenha em mente, para os ajustes finais, que deve ser re-ajustes nos tempos P2 e P3 vários potes, a fim de ter indicações corretas da Elevação de leitura em M1.
O método é:
a) conjunto P2 e P3 cerca de 1 / 3 do GND.
b) colocar a sua antena na elevação mais alta (limite superior, 90 °) e ajuste o P2 de deflexão máxima do M1.
c) colocar a sua antena para a elevação mínima (limite inferior) e ajustar o P3 de deflexão mínima de M1.
Você deve repetir várias vezes que (passos b & c), a fim de ser capaz de indicar a deflexão total M1 de elevação máxima e mínima de 0 °.
Fig 9
Um ponto difícil para muitos Hams no sistema Elevation "homebrew" é o de engenharia. Às vezes a nossa bancada não cobre este desafio, não temos as ferramentas para a construção de peças metálicas. Esta página vai tentar ajudá-lo com métodos simples, sem ferramentas especializadas, apenas usando uma chave de fenda, uma furadeira e alicate.
Já me perguntei muitas vezes, como é possível isso. Minha primeira idéia simples é mostrado nas fotos abaixo.
Fig.10 mostra, como podemos construir uma "dobradiça", usando apenas quatro cantos metálicos, duas placas de metal, um parafuso do eixo e parafusos diversos, porcas e parafusos em U. (Tudo o que você pode encontrar em lojas-Geral, ou seja, "Practiker" por cerca de 10 Euros)
Desta forma, o "tubo" (cross-boom) podem ser movidos no perímetro do quadrante (90 °), tendo como centro o "Eixo" (o Elevador do Eixo, como mostrado na Fig.10).
É um grande benefício se você pode encontrar algumas das partes mecânica de veículos pesados de alumínio (ou seja, as placas), porque a seção de mecânico de elevação está na parte superior do mastro. Assim, se o peso no topo do mastro é menor, que é o lucro.
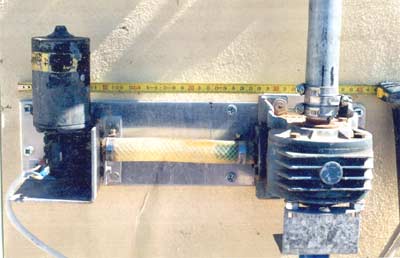
A foto a seguir mostra, como a "dobradiça" trabalha com a ajuda do atuador, a fim de ser capaz de variar a elevação.
... e a imagem abaixo mostra o meu sistema Elevador primeiro com atuador
(No meu banco, sem a cruz-Boom).


Um grande exemplo desse sistema foi feita por SW1IXP.
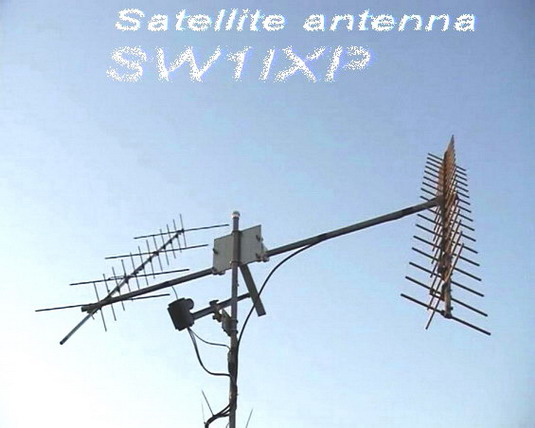
Você pode ver nesta página "clique aqui" várias fotos e um vídeo curto sobre o assunto.
Outro método é mostrado na figura abaixo. Por meio de dois tubos concêntricos, GM4JJJ atinge a construção de um simples e heavy-duty "dobradiça".
O tubo exterior é estável com U-parafusos na placa de metal ... o tubo interno, que tem diâmetro menor slides dentro do tubo externo com a ajuda de graxa.
Este método é mais simples do que os anteriores, mas tem o atrito entre os tubos. Por outro lado, é muito pesado, de preferência para sistemas de antenas grandes, como "multi-stacked Yagis", EME antenas, etc

Finalmente, a imagem acima mostra uma alternativa, ROTATOR, barato homebrew usando um pequeno "redutor" e um motor de limpa pára-brisas (SV1EPE patente)! A relação em wormwell de redução de engrenagem é 360:1, de modo que o mastro é movido facilmente a partir do pequeno motor, sem problema.
O "engate" entre o motor ea caixa de câmbio é apenas um pedaço de mangueira!
Isso é tudo pessoal! Se você tem alguma nova idéia, comentário ou sugestões sobre estes sistemas Elevador, é mais do que bem-vindos. Apenase-mail me.
FONTE - http://www.dxzone.com/cgi-bin/dir/jump2.cgi?ID=11221
Nenhum comentário:
Postar um comentário