Achei esta matéria no portal http://sistemadearmas.sites.uol.com.br/ e é claro valhe muito ler todo o seu conteúdo e assim fazer uma breve analogia com o nosso hobby.
EXPLORAÇÃO ELETRÔNICAQualquer estudante sério de história militar pode se lembrar de incontáveis exemplos de como os aprimoramentos da tecnologia têm conduzido a mudanças nas táticas. Apesar de tudo, o primeiro objetivo do comandante de lançar poder de fogo em apoio a missão permanece inalterado. Contudo, com o objetivo de cumprir esse objetivo, o comandante ainda deve localizar o inimigo, acompanhá-lo e engaja-lo. O esforço para conseguir isso envolve todos os métodos de vigilância, do campo visual a interceptação de emissões eletrônicas, o que é conhecido como esclarecimento.Esclarecimento envolve coleta de dados, ativo e passivo, por todas as forças amigas para serem usadas pelo comandante. O grau de eficiência do esclarecimento é função da área coberta pela unidade de tempo. Funções de comando e controle, para o propósito da discussão, são aquelas que permitem ao comandante relacionar informações de esclarecimento do tamanho e disposição das forças inimigas e disseminar esta informação para suas próprias forças para explorá-las no campo de batalha.Como os melhoramentos tecnológicos têm mudado o envelope de engajamento do horizonte visual para mais de 1000km, o problema do esclarecimento tem sido complicado exponencialmente. Por quê? Simplesmente devido ao aumento da área que deve ser coberta pelo comandante para se sentir seguro que qualquer unidade dentro do raio de ação necessária foi descoberta.Além disso, devido ao aumento da letalidade dos armamentos, a "Batalha do Primeiro Disparo" é uma consideração prioritária. O comandante que encontra o inimigo primeiro e realiza um ataque efetivo, enquanto impede seu oponente de fazer o mesmo, está no caminho da vitória. Como tal referido como a "the battle of the airwaves", o campo de batalha eletrônico é a chave da vitória.
GUERRA ELETRÔNICA (GE)O termo GE engloba todas as ações militares realizadas para assegurar o uso eficaz das nossas próprias emissões eletromagnéticas e eletro-ótica e para impedir, reduzir ou prevenir que o inimigo possa fazer uso eficaz de suas emissões.Os sistemas de GE variam em uma ampla gama de sistemas, sendo meios ofensivos e defensivos, usados por forças opostas do espectro de comunicação, radar, IR e visual para negação mútua de suas respectivas capacidades.São usados como cobertura para ataque de surpresa ou auto-proteção. Seriam o equivalente medieval a "armadura" do cavaleiro que permite chegar próximo do inimigo para um golpe final sem se tornar vulnerável.O objetivo é evitar o uso do espectro Eletromagnético (EM) pelo inimigo, radar ou comunicações com bloqueio ativo ou interferência passiva com chaff ou chamarizes (decoy), assim as condições de propagação sofrem alterações e distorções que impediriam fortemente a possibilidade de comando controle e busca de informações, anulando ou degradando o emprego eficaz dos sistemas de armas ofensivos e defensivos.As contramedidas na região de radio frequência (RF) são agrupadas no termo Guerra Eletrônica - GE (EW - Eletronic Warfare em inglês). A GE tem três subdivisões distintas: Medidas de Apoio de Guerra Eletrônica - MAGE, Contramedidas Eletrônicas - CME e Contra-Contramedidas Eletrônicas - CCME ou ESM, ECM e ECCM/EPM em inglês, respectivamente.As contramedidas incluem todos os meios de explorar uma atividade inimiga para determinar suas intenções ou reduzir sua efetividade. Contramedidas podem ser aplicadas contra armas operando sobre todo o espectro, das ondas de som até as frequências gama. Como o uso mais frequente do espectro pelas armas/sensores/comunicações fica na frequência de radio (RF - de vários kHz até dezenas de GHz), a maioria das contramedidas e contra-contramedidas também operam nesta região do espectro.As porções IR e acústica do espectro também são de interesse, mas desde de que estas regiões têm ainda que ser exploradas pelas armas/sensores/comuncações, poucos medidas específicas e ECCMs existem além da região RF. Apenas as CME tem recebido atenção nas áreas acústicas e IR.Além de evitar a detecção e identificação por um sensor ou arma inimiga, as contramedidas também incluem os meios para reduzir sua efetividade destes meios destrutivos. Os sistemas de armas são certamente mais desejáveis para estas tarefas.
O MAGE realiza ações para detectar, interceptar, monitorar, localizar, gravar/registrar, avaliar, identificar e analisar a energia eletromagnética irradiada, para reconhecer, rapidamente, a ameaça ou fonte de emissões hostis, explorando-as para proveito das operações táticas. Ela busca o espectro de radio freqüência de emissões para analisar o resultado da exploração dos sensores ou armas envolvidos.
Permite, também, a obtenção de alerta antecipado da presença inimiga. Os receptores MAGE sempre detectarão os radares inimigos antes que as plataformas dotadas desses receptores possam ser detectadas pelos radares hostis referidos, de vez que as ondas radar, para retornarem na forma de "ecos" úteis aos equipamentos radares inimigos, têm que percorrer um caminho de ida e volta. Nas grandes distâncias, essas ondas terão potência suficiente para chegar aos receptores MAGE, mas as atenuações dos "ecos" no caminho de volta os tornam poucos discerníveis pelos receptores radar inimigo. Esse fenômeno gera o uso especializado das MAGE, em alguns casos, apenas para função de Alarme Radar (RWR - Radar Warning Receiver), como o existente nos periscópios dos submarinos e em aeronaves. Um comandante de submarino pode saber, ao periscopar, da presença de um radar próximo de forma quase instantânea e imediatamente submergir, evitando exposição do periscópio e sua possível detecção. Um piloto de caça pode ter alerta de enquadramento por sensor ou arma inteligente e dar inicio a manobras evasivas ou uso de contramedidas adequadas.
Esta exploração inclui, além do alerta antecipado tático, a identificação para seleção de contra-armas e gravação para o desenvolvimento de CMEs.
Os MAGE são os receptores de GE primários e funcionam como um sensor e meios de identificar emissões eletrônicas inimigas, amigas ou neutras. Ele fornece alerta de ataques em potencial, informações das capacidades inimigas e a identificação de uso de CME inimigas para manipular o espectro EM (eletromagnético).
A recepção de sinais é uma atividade discreta e compreende basicamente as atividades de:
- Busca - nas faixas de frequência rádio e radar do inimigo;
- Interceptação - a detecção propriamente dita de um sinal;
- Goniometria ou Localização - obtenção da direção azimutal da emissão;
- Análise e Identificação - mediante registro e estudo das características do sinal, tais como sua frequência, largura de pulso, frequência de repetição de pulso (FRP ou PRF) intensidade relativa do sinal, número de rotações da antena, etc, dados capazes de identificar o equipamento emissor, mediante análise adequada - em geral feita de forma automática, nos equipamentos modernos.
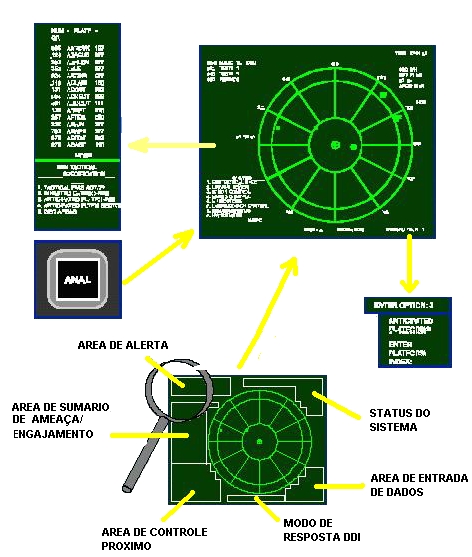
Tela do Sistema MAGE AN/SLQ-32 da US NAVY.
O projeto de um receptor de guerra eletrônica fornece um desafio especial para o engenheiro, onde uma única antena ou circuito de recepção específico pode cobrir todo o espectro EM. Um conjunto de componentes pode ser projetado para fornecer a maior eficiência possível numa variação de alguns milhares de megahertz, contudo, os requerimentos atuais demandam um desempenho entre alguns kHz a 50 GHz com um largo alcance de resistências de sinais e outros parâmetros com largura de pulso, PRF, razão de varredura, características de banda lateral e modulação. A solução tem sido a conexão de vários circuitos sensíveis a diferentes frequências chamados sintonizadores e seus pré-amplificadores associados para uma cadeia comum de amplificadores principais e exibidores ou unidades de armazenamento de dados.
Os critérios primários de um receptor de GE são:
- Largo espectro de vigilância que deve variar de 30 kHz a 50 GHz. Vários receptores são necessários para cobrir toda esta faixa;
- Grande variação de recepção. O receptor deve ser capaz de receber tanto sinais fracos quanto os mais fortes sem mudar suas características. Contatos próximos dão sinais estranhos que desabilitam a análise;
- Rejeição de sinais indesejáveis ou ruído de fundo (passagem de banda estreita). Vários sinais podem existir concomitantemente, com frequências próximas ao sinal de interesse. O receptor deve discriminar entre as frequências em que está sintonizando e os sinais de outras frequências;
- Capacidade de medir do ângulo de chegada. Permite localizar o transmissor ao fornecer a direção em tempos diferentes ou de plataformas diferentes em várias posições. Ao colocar as direções num mapa será possível localizar o emissor por triangulação. O mesmo trabalho pode ser feito automaticamente por computadores. Com um único sensor será necessário usar métodos de análise de movimento do alvo ( Target Motion Analysis - TMA);
- Capacidade de análise de sinais. Fornece meios de determinar a modulação do sinal, lóbulos laterais, largura de pulso e PRF, permitindo associá-lo com outro já identificado e relacionado com plataforma conhecida.
- Exibição de dados adequados. Pode variar de luzes de alerta a sistemas complexos de exibição controlados por computador.
- Sistema de gravação magnético para análise de dados quem também incluem transmissões de TV, rádio e dados.
- A coleta de sinais tem 3 estágios: alerta, distribuição e análise.
Especificações gerais de sistemas MAGE/CME naval:
- Faixa de frequência MAGE: 0,5 a 18-20 GHz;
- Faixa de frequência CME: 7 a 18 GHz;
- Sensibilidade: melhor que -60dBm;
- Precisão de Azimute (goniometria): melhor que 6 graus RMS;
- Multi-engajamento de alvos(CME): mais de dez simultaneamente (sistema naval);
- Cobertura Azimutal (CME e MAGE): 360 graus;
- Cobertura em elevação (CME e MAGE): até 85 graus;
- Tempo de reação (CME): menor que 1s;
- Memória (MAGE): cerca de 2.000 emissores;
- Funções complementares: EOSM e IRSM;
- Interfaces possíveis: lançadores Chaff e Flares, despistadores, sistemas C4ISTAR, sistemas de defesa de ponto(mísseis e canhões);
Triangulação
Os sistemas MAGE modernos como o SLQ-32 são capazes de identificar a classe do emissor que produz as transmissões. Algumas emissões são únicas para uma única classe de navio, aeronave ou submarino. Assim que a emissão é detectada, o comandante será capaz de classificar a ameaça. A maioria dos emissores, contudo, são levadas por várias plataformas. Então, uma simples emissão pode produzir uma lista de possibilidades de prováveis plataformas. Quando isso ocorre, o comandante deve assumir o pior caso possível de todas as possíveis ameaças como prudência.
Emissões subsequentes de outros tipos de radares da mesma direção permitem diminuir a lista de possíveis ameaças, simplesmente excluindo as plataformas que não tem esse sistema de emissão, mas formações de muitos navios podem não disponibilizar esse tipo de avaliação .
Uma unidade que irradia, e é então classificada pelo inimigo, não é necessariamente engajada ou mesmo localizada com algum grau de exatidão. Se uma única unidade da força recebe a transmissão, uma linha de direção da fonte é gerada. Se várias unidades da força recebem a interceptação, pode-se relacionar suas direções para definir uma elipse conhecida como área de probabilidade, na qual a unidade deve estar. Esta técnica é conhecida com triangulação passiva (ver figura 3). Quanto maior for a separação entre as unidades coordenando a triangulação, maior será os ângulos com a unidade procurada e menor a área de probabilidade.
Para o esforço de MAGE ser efetivo, o inimigo deve cooperar irradiando seus emissores. Devido ao potencial mortal de um ataque passivo, além do horizonte, de mísseis, na qual o primeiro alerta é a iluminação pela cabeça de busca do míssil na sua fase terminal de vôo, pode-se questionar se o risco de irradiar é maior ou menor de não fazê-lo. A resposta é sim, mas irradiar deve ser feito quando é taticamente desejável e evitado quando não o for. Um campo de batalha é um ambiente dinâmico e as situações que ditam mudanças na postura de emissão também são fluidas.
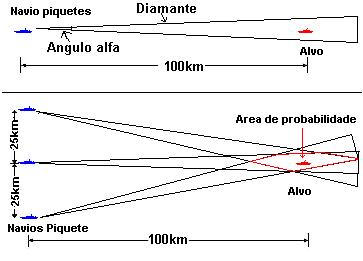 Figura 3: Como a separação geográfica torna a triangulação mais efetiva. No primeiro exemplo o alvo(vermelho) está em algum lugar do diamante (não se sabe a distância ao certo). O ângulo alfa depende da sensibilidade do ESM. O diamante tem alcance limitado (no caso pode ser o horizonte radar). No segundo exemplo, o cruzamento dos diamantes resultam em uma área de probabilidade (em vermelho). Alguns navios do segundo exemplo poderiam ser helicópteros.
Figura 3: Como a separação geográfica torna a triangulação mais efetiva. No primeiro exemplo o alvo(vermelho) está em algum lugar do diamante (não se sabe a distância ao certo). O ângulo alfa depende da sensibilidade do ESM. O diamante tem alcance limitado (no caso pode ser o horizonte radar). No segundo exemplo, o cruzamento dos diamantes resultam em uma área de probabilidade (em vermelho). Alguns navios do segundo exemplo poderiam ser helicópteros. RECONHECIMENTO ELETRÔNICO
É uma atividade exercida essencialmente em tempo de paz e de forma discreta, com o objetivo de coletar, avaliar, analisar, interpretar e atribuir valores às informações sobre os irradiadores (comunicações, radares, guiamento de armas e navegação) dos meios navais, aéreos e terrestres do inimigo em potencial. Os dados fornecidos por essa atividade são usados para programar as memórias dos sistemas MAGE ou desenvolver e programar bloqueadores eletrônicos e planejar o emprego tático da GE.
Para conseguir surpresa e evitar ser surpreendido é necessário fazer uso de cancelamento e controle. O sistema de detecção, comando e controle devem ser atrapalhados o mais rápido possível para diminuir sua eficiência. Em primeiro lugar ele deve ser conhecido e localizado. Isto pode ser feito em tempo de paz e é a razão de ser do reconhecimento e vigilância eletrônica.
Os conceitos necessários para entender o RE são:
- SIGINT (Signal Inteligence) - É a detecção, identificação, classificação e análise de emissões eletrônicas amigas, inimigas, potenciais inimigos e de neutros. A localização do sinal não é o objetivo mais importante. A SIGINT pode ser tática e estratégica (o termo politicamente correto seria campo de batalha e teatro). As operações de SIGINT podem ser realizadas por plataformas aéreas, terrestres e marítimas. As mais efetivas são as plataformas aéreas sendo que as superpotências podem usar sistemas de satélite.
- ELINT (Eletronic Inteligence) - É a técnica de informações derivadas de uma transmissão estranha, que não seja de comunicação. Coleta, localização, direcionamento e análise de transmissões de radares e outras transmissões não comuns e a sua documentação; é a coleta de informações técnicas e de inteligência derivada de radiações eletromagnéticas que não sejam de comunicações e que não tenham como fonte às detonações nucleares.
- COMINT (Comunication Inteligence) - técnica e informações derivadas das comunicações estranhas. Pode ser explorada ao localizar as forças hostis. Na maioria das vezes o valor está na monitoração e análise do conteúdo de toda gama de transmissão inimiga;
- TELINT - Tem a função de coletar dados de vôo (telemetria) de aeronaves e foguetes.
- RINT – RADINT (Radiation Inteligence). É a coleta de informações derivados de todos emissores de energia EM que não seja uma detonação nuclear.
- MAGE/MAE/ESM - Até certo grau é bem semelhante a ELINT no sentido de envolver a detecção de radares hostis e outros equipamentos. A diferença é que a ELINT concentra-se na pesquisa original ou repetida confirmação dos dados paramétricos, enquanto a MAGE consistem nas ações de busca, interceptação, identificação e localização dos sinais eletrônicos para reconhecimento imediato da ameaça. Está programado para reconhecer apenas emissores já conhecidos.
- RWR - É um sistema MAGE especializado que da alerta contra ameaças imediatas como AAA e mísseis SAM e AIM guiados por radar.
O ponto de partida de todos sistemas de GE, ativos ou passivos, é o conhecimento detalhado da estrutura paramétrica dos radares e as características técnicas e uso operacional de outros equipamentos do inventario dos inimigos e aliados. Envolve a medição da transmissão radio frequência do radar(RF), frequência de repetição de pulso (PFR) e duração de pulso (PD), além da razão e padrão de varredura . A maioria dos radares tem RFs e PRFs de reserva para uso em tempos de guerra e a monitoração frequente irá revelar estes modos. COMINT também revelam padrões e modos durante testes e calibração.
Com o avanço da técnica envolvendo a estrutura dos sinais refletidos do alvo foram desenvolvidas bloqueadores de dissimulação (deceptive jamming). De acordo com a técnica moderna, os sistemas interferidos não são bloqueados ou interferidos mas enganados pois os sistemas GE modernos dependem da duplicação e retransmissão de um sinal no formato do original que engana através de retornos falsos e idênticos que substitui o formato do pulso original.
Requerimentos de aeronave SIGINT:
- Grande alcance e autonomia para ficar muito tempo na estação e operar longe da base;
- Capacidade de levar grandes cargas (caixas pretas) e suprir energia para elas e para as estações de operações;
- Altitude de operação bem alta para combinar uma distância segura do inimigo com capacidade de permanecer acima da linha do horizonte em relação ao alvo.
- Alta velocidade é desejável para diminuir o tempo de translado, mas não obrigatório. As aeronaves turboélices são mais lentas porém mais econômicas. Um objetivo seria maximizar a distância que os caças inimigos teriam que cruzar e aumentar o tempo para chegada de ajuda.
As aeronaves de RE são geralmente derivadas de aeronaves de transporte e patrulha marítima. As missões de ELINT/COMINT são geralmente aplicadas contra navios no mar e exércitos em terra ou sistemas de defesa aérea. Sistemas ELINT podem ser levados em casulos por caças e outras aeronaves especializadas como o U-2 para tarefas mais especializadas.
Estas missões não costumam ser realizadas sozinhas. Aeronaves de reconhecimento podem ter capacidade ELINT além das relacionadas com imagem EO/IR ou SLAR. No último caso estariam realizando uma tarefa de reconhecimento ativo. Aeronaves de GE podem ter algum tipo de ELINT especializada (EC-130H) e aeronaves de COMINT podem ter meios de interferência eletrônica de comunicações.
Exemplo de parâmetros de radares de busca aérea navais:

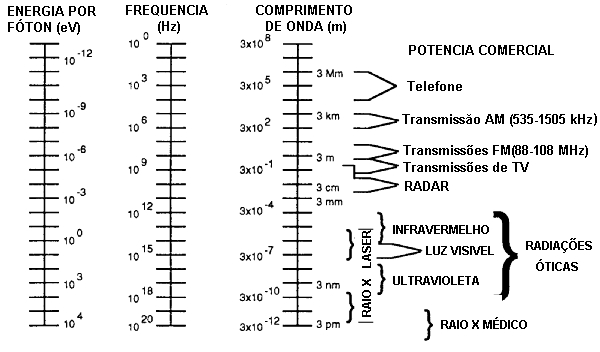
Largura de Banda
CONVENÇÃO ANTIGA

Comprimento de onda em cm=30.000/frequência em MHz.
Embora as maiores frequência permitam que pequenas antenas tenham a mesma largura de feixe, as frequências maiores sofrem absorção pela umidade do ar. As chuvas também as refletem mais dando um efeito similar ao chaff.
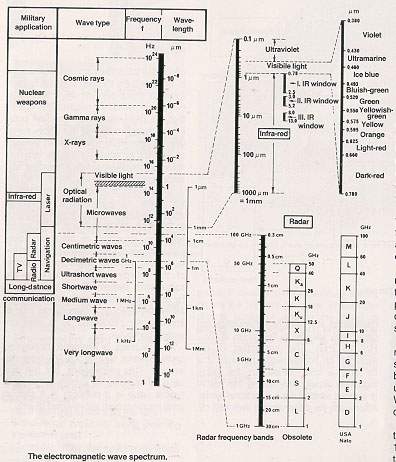
Convenção de Nome de Radio Frequência desde 1969

Exemplos de usos comuns por Banda de frequência:
4.4004.990 MHz
Comunicações fixas e móveis links de comando data links3.100-3.650 MHz
radares móveis de alta potência radares de controle de tráfego aéreo embarcados links de mísseis2.200-2.290 MHz
telemetria de mísseis rastreio, telemetria e comando de satélites militares(EUA) microondas LOS1.755-1.850 MHz
rastreio, telemetria e comando de satélites militares(EUA) microondas LOS Comunicações táticas data links táticos sistemas de treinamento de combate aéreo1.215-1.390 MHz
Radares de defesa aérea de longo e médio alcance navegação por rádio radares de controle de rota aérea comunicações táticas apoio de telemetria de estande de tiro defesa aérea e de frota GPS Sensoriamento por satélite detecções nucleares420-450 MHz
Radares de vigilância e alerta antecipado de mísseis balísticos radares de alerta antecipado aerotransportados e navais comando de veículos aéreos localização de posições de tropas radares anti-furtivos radares penetradores em cobertura vegetal (FOPEM)400,15-401 MHz
satélite meteorológico militar(EUA)
225-400 MHz
data links táticos aéreos e ar-terra comunicações por satélites controle de tráfego aéreo militar busca e resgate comunicações executiva comunicações táticas138-144 MHz
data links táticos aéreos e ar-terra
rádios terrestre móveis
PARÂMETROS DE RADAR
Frequência
A fonte básica de radiação do radar é um transmissor de alta potência que são cavidades ressonantes de modo que sua frequência primária é determinada pelo tamanho físico. Para uma dada fonte (geralmente um magnetrom ou klystrons), variações desprezíveis no centro da frequência ou operações em harmônicas é possível, mas estas variações reduzem a potência de saída do radar.
A frequência do radar (RF) é uma onda sinusóidal em cadeia gerada pelo transmissor no seu estado livre. Num pulso de radar, a saída é desligada/ligada para gerais séries de pulsos. Cada pulso na série tem uma RF do transmissor. Isto é, cada pulso no conjunto de onda de uma frequência igual a do transmissor.
A seleção de uma frequência de operação é determinada pela janela de transmissão atmosférica e a função do radar. A frequência determina as dimensões ótimas da antena, estágios dos receptores de entrada, as conexões antena-transmissor-receptor e os níveis de potência de saída. Um radar normalmente deve operar na sua ressonância natural para obter a melhor performance.
A agilidade de frequência de um radar opera na variação normal de modulação do transmissor ou ele varia as harmônicas. As duas técnicas precisam de tempo para serem efetuadas e degradam o desempenho do radar de modo que a agilidade de frequência pulso a pulso é mais teórica que prática. A agilidade de frequência é comumente creditada ao sistema de radar, mas normalmente significa que várias frequências estão disponíveis. Uma vez que o radar está rastreando, a frequência deve manter-se quase fixa.
Os radares ameaças podem ser caracterizados por suas frequências - geralmente alta freqüência (2-40 GHz). Com o aperfeiçoamento do estado de arte dos radares, as frequências estão aumentando. Atualmente, um ESM/RWR precisa apenas atuar em frequências de 2-20 GHz.
Largura de Pulso
A resolução de alcance é na melhor das hipóteses metade da distância da que o pulso viaja num tempo igual a largura de pulso. Esta limitação é imposta pela natureza. O radar deve ser capaz de separar alvos múltiplos e interferências. Então, o radar pode ser caracterizado por larguras de pulsos curtos
O pulso move-se a cerca de 330m/microsegundos. A redução do tamanho das do diâmetro dos mísseis necessitam de larguras de pulsos mínimas. O estado da arte e a razão de sinais-ruídos determina a largura de pulso mínima. Um RWR precisa concentrar-se nas larguras de pulso na faixa de 0,1-1,0 microsegundos.
Radares que funcionam apenas na detecção inicial e localização de setor do alvo são chamados de alerta antecipados, busca ou radares de aquisição. Desde que a resolução de alcance não seja necessária (mas sim uma grande potência), a largura de pulso destes radares é muito longa. A análise teóricas ou pesquisas de campo suportam a generalização que larguras de pulso maiores que 1,5 metros não são de radares ameaça imediata.
Desde que o radar ameaça precise estreitar a largura de feixe, muitos TTRs tem modos de aquisição de operação para localização (aquisição) inicial. Apesar destes modos poderem ter larguras de pulso e varreduras que violam as regras acima, eles não devem ser confundidos com um radar de aquisição real.
Frequência de Repetição de Pulso (FRP - PRF)
O computador do radar determina o alvo pela medida do tempo decorrido entre a transmissão do pulso e o retorno do alvo. Para medidas de alcance, não pode ser recebido mais que um pulso do alvo para cada pulso transmitido pelo radar. Então, o alcance máximo necessário pelo radar determina a razão de pulso do radar.
Dois colorários da condição de distância são:
1 - Radares de alto PRF são rastreadores de curto alcance;
2 - Armas de curto alcance tem radares de alto PRF.
Técnicas de interferência de distância de radar podem atuar facilmente ao repetirem a interferência de dentro da aeronave. Para cada pulso recebido, o repetidor envia um ou mais pulsos que levam o computador de radar a calcular a distância incorreta. Desde que os pulsos do alvo tenham a mesma PRF dos pulsos transmitidos, o radar pode usar filtros de PRF para receber apenas naquela razão. Isto requer que o processador de sinal do repetidor de interferência avalie o PRF que chega para que sua razão seja usada.
Balanceamento
Várias medidas adaptativas podem ser assumidas pelo radar para diminuir sua suscetibilidade as contramedidas eletrônicas (CME). Uma que fará o trabalho do repetidor de interferência mais difícil é a incorporação de séries de pulsos calibrados. Contudo, as mesmas leis básicas da natureza se aplicam ao pulso exótico (o tempo entre um grupo de pulsos não pode ser menor que o alcance máximo do radar). O pulso balanceado (PRF) também melhora se associado a características como indicação de alvos móveis (MTI) pela redução do efeito de pontos cegos no radar.
Uma série de pulsos balanceados tem fundamentalmente um PRF básico com a mesma PRF enfatizado sobre si mesmo uma ou mais vezes. Cada nível de assinatura utiliza um tempo de partida diferente ou referência que evita a geração de pulsos concorrentes ou pulsos sombreados. O número de níveis é o número de vezes que o PRF/PPI (período inter-pulso) é integrado a série de pulsos.
Jitter
O trabalho do interferidor pode ser dificultado usando um PRI Jittered (nervoso). No modo Jitter, o tempo entre pulsos sucessivos, é permitido variar em uma tonalidade randômica de modo que uma série de intervalos determinados tão longos quando o as condições de alcance máximo permita.
Padrões de Balanceamento-Jitter
Até alcançar o alcance máximo permitido, um número infinito de padrões PRI pode ser gerado pelo balanceamento e Jitter. O PRI pode ser modulado por funções bem definidas: um PRI movendo-se muito devagar/diminuindo o PRF; uma diminuição de PRI em declive em intervalos com uma função de decrescimento cíclico; e uma variação de modulação de PRI a intervalos de modo sinusoidal ou triangular. Algumas combinações parecem ser projetadas para frustrar processadores de análise digital.
Guiamento de Mísseis
Os mísseis guiados geralmente não são guiados após a passagem de um alvo, eles não perseguem ou seguem uma aeronave. Ao invés disso, o computador de controle de fogo prediz um ponto de interceptação numa parte futura da trilha de vôo do alvo pelos parâmetros do TTR e pelo envelope de manobras conhecidos do alvo e do míssil. Os mísseis são como canhões que são disparados num ponto a frente (lead-angle). O míssil é acelerado (boosted) na fase inicial do seu vôo após o qual ele nunca acelera e apenas muda de direção para manter-se centrado no ponto de interceptação.
Comando de Guiamento
Para um míssil guiado interceptar um alvo, ele deve saber o tempo todo onde o ponto de interceptação está em relação ao próprio míssil. O método mais simples para o míssil é a separação do transmissor, localizado próximo do TTR, que envia códigos de comando de guiamento (para esquerda, para cima, etc) para o míssil.
Assim ele funciona como uma aeromodelo rádio controlado. Este método é barato e o sinal de guiamento quase imune a interferência desde que a antena e o receptor sejam direcionais, o que permite o comando por métodos manuais e rastreio ótico do alvo quando o radar de rastreio esta sendo interferido ou inoperante. Tem a séria desvantagem da necessidade do sitio de rastreio ter que manter o rastreio do míssil para gerar comandos de uplink (erros de correção).
Quando o míssil e o alvo se aproximam do ponto de interceptação o rastreador do míssil (MRT) deve apontar diretamente para o alvo e então é altamente susceptível a interferência.
Uma segunda fraqueza deste sistema é que desde que o míssil nunca vê o alvo, alguma espoleta deve ser levado pelo míssil para reduzir erros de distância. Contudo, este sistema é vulnerável a CM de três formas: TTR, MTR e de espoleta.
Quando se usa rastreio ótico o alcance do míssil fica limitado ao alcance do sensor ótico. Uma conseqüência é que o curto alcance faz o míssil ficar pequeno e barato.
Guiagem tipo Homing
É uma variação do comando de guiamento. O MTR é substituído por um potente radar iluminador de onda contínua (CW) que é pareado e direcionado pelo TTR. O míssil se guia no retorno Doppler do alvo. Este método é vulnerável de três formas. A principal diferença é que como o comando de guiamento é transmitido. Desde que o radar iluminador CW não seja um MTR, a terminologia usada no RWR usa Radar de Guiamento de Míssil (Missile Guidance Radar - MGR) para designar todos os radares usados pelo RWR para determinar a identificação.
Guiagem Beam Rider
Um terceiro método de guiamento é o "beam rider" onde os mísseis SAM voam no feixe do TTR. Um computador de bordo mantém o míssil centrado no feixe do radar usando uma antena voltada para trás. Desde que o feixe de rastreio do alvo seja pequeno o suficiente para assegurar a precisão do rastreio, a estação de terra normalmente usa um radar de baixa potência e feixe largo para "capturar" o míssil durante o estágio inicial do vôo e guiá-lo dentro do feixe de rastreio. Este sistema requer que o míssil esteja em giro constante enquanto segue o feixe de rastreio até o alvo.
Estas manobras se tornam severas durante a fase terminal do vôo e podem exceder as limitações físicas do míssil, particularmente se o alvo realiza manobras evasivas. O feixe de captura é imune a interferência do alvo desde que o receptor e a antena do míssil estejam direcionadas para trás. Perdas de distância podem ser melhorada se o sistema tiver uma espoleta de proximidade. Esta abordagem simplifica a estação em terra ou mar ao descartar itens caros e tendo poucos pontos susceptíveis a interferência - o TTR e a espoleta de proximidade. A desvantagem mais séria dos sistemas beam rider é que o TTR deve estar ligado para guiamento do míssil, mesmo que o rastreio seja feito por outros meios.
Interferência de Espoleta
O comando de guiamento e o beam rider são susceptíveis a interferência de radar de rastreio e de espoleta. A espoleta mais simples é o radar de proximidade que envia um sinal de feixe alargado e mede a potência do eco do alvo. Para um dado tamanho do alvo e espoleta, a potência transmitida que retorna do alvo quando o míssil esta no raio letal da cabeça de guerra pode ser calculada. Ao usar um limiar de detecção no receptor da espoleta a cabeça de guerra é detonada quando o raio letal é atingido. Este sistema pode ser interferido ao fazer o retorno do alvo maior do que o normal para a cabeça de guerra detonar prematuramente, fora do raio letal.
Na terminologia das contramedidas, a interferência de espoleta é uma "ação de último recurso". Ela pode ser evitada nos dois sistemas de guiamento se o radar de rastreio puder ser vencido completamente ou degradado. A maioria dos sistemas de CME são dedicados a radares de rastreio desde que alvos levando transmissores interferidores de espoleta possam agir como meio de acionamento de espoleta.
Correlação de Guiamento de Mísseis
Dos métodos de guiamento, o comando de guiamento é o mais encontrado. No caso de pulsos TTR ou MGR, deve-se notar que a sincronização de dois radares e a correção dos comandos do míssil precisa de alguma proximidade entre o PRF dos dois radares. Então, é possível no caso de sistemas de todos-pulsos determinarem se a TTR entrou no estado de lançamento de míssil (LM) ao testar a relação entre a série de pulsos TTR e MGR.
Para um RWR detectar o estado de lançamento de mísseis de um sistema de guiamento de mísseis, os pulsos do iluminador de CW deve ser recebido. Esta detecção precisa de um se um receptor de entrada superheterodyne no RWR. Num sistema CW puro, a detecção de microonda do estado de lançamento de mísseis não é possível.
Determinado o LM de um sinal de espoleta de proximidade é questionável pois a potência da espoleta é muito baixa e nenhum alerta real será obtido. Uma espoleta de 100-200 watts, detectada de um míssil a Mach 2 a menos de 1km dará 1 ou 2 segundos de alerta, o que significa que a tripulação terá uma "morte tensa".
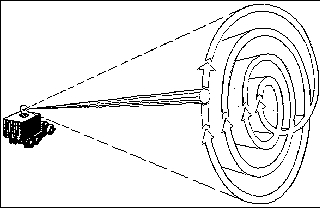
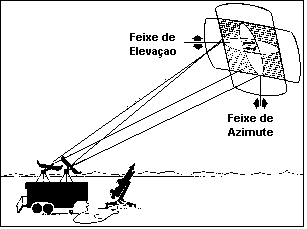
Uma das características mais útil do radar é sua habilidade de predizer continuamente a próxima localização do alvo a partir de uma informação recebida do alvo e se alinhar continuamente para apontar para a localização predita. Quando isto ocorre, o radar é dito estar "rastreando o alvo". Para fazer esta predição, o radar mede o retorno de potência do alvo de várias posições levemente balanceada do alvo além da que retorna diretamente do alvo. Feito isto, para rastrear o alvo, o radar deve olhar onde o alvo não está. Quando a energia de retorno se move numa destas localizações, o radar pode dizer que o alvo se moveu. O tempo decorrido entre a olhada diz ao radar o quanto rápido o alvo está se movendo. Este movimento do feixe do radar ao redor do alvo é chamado "padrão de varredura" ou "varredura" do radar.

Sistema de radar usando varredura helicoidal com feixe em forma de lápis.
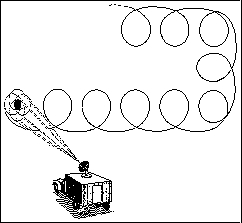
Radar usando varredura em espiral com feixe em forma de lápis.
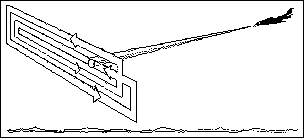
Radar de interceptação aéreo com varredura em Raster.
Radar de superfície com varredura Palmer-Raster
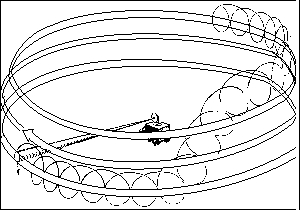
Radar usando combinação de varredura helicoidal-palmer.
Tipos de Varredura
Varredura Cônica
Os sistemas de radares podem ser categorizados pelos seus padrões de varredura. O mais usado é a varredura cônica padrão Con Scan (varredura cônica). Neste método, o radar gira seu radar ao redor do circulo descrito pelo ponto de meia-potência do feixe quando o feixe é avistado no alvo. O feixe, quando recebido no alvo ou no radar, terá uma forma de onda sinusoidal cuja amplitude é proporcional a distância do alvo que está longo da vista. Ao monitorar a localização exata do feixe de varredura, a localização do alvo pode ser determinada pela localização da potência máxima recebida. Quanto mais precisamente o radar rastreia o alvo, menor a amplitude da onda sinusoidal, na amplitude zero o radar esta diretamente sobre o alvo.
Sistema de varredura cônica precisam de um conjunto mínimo de hardware e então são geralmente usados em sistemas móveis e baratos como artilharia antiaérea e estações de mísseis SAM. Eles têm a série desvantagem de não serem capazes de ver o alvo fora do seu padrão de varredura estreita. Isto significa que não apenas é necessário um segundo radar para ajudar a encontrar o alvo (adquirir o alvo) mas também a aeronave rastreada pode facilmente escapar se consegue quebrar o rastreio pois o radar de varredura cônica não pode ver o alvo, exceto no modo de rastreio.
Rastreia-Enquando-Varre (Track-While-Scan - TWS)
O problema de varredura cônica pode ser superado com os radares TWS. Eles varrem seus feixes sobre uma área relativamente grande. O computador do radar ainda mede a energia refletida como uma função da localização do feixe para fornecer rastreio mas a maior área varrida permite que o radar ainda veja o alvo mesmo se o rastreio é quebrado ou perdido. Contudo, esta grande área varrida faz o radar TWS altamente vulnerável a CMEs.
Radar TWS
Os radares TWS precisam de considerações especiais durante o projeto dos sistemas RWR. Desde que muitos receptores variam a banda de frequência, é possível que o receptor possa não estar "olhando" na banda de frequência TWS.
A probabilidade desta perda de interceptação aumenta com a distância do TWS pois a área varrida tem divergência angular. Para superar este problema, o RWR deve ser programado para mostrar o TWS na sua primeira interceptação e deve ser programado para não apagar o símbolo do TWS até um certo número de interceptações perdidas. Destes dois fatores, a interceptação perdida é a mais preocupante para a aeronave desde que o símbolo tenha que permanecer no mostrador mesmo após o TWS ter parado o rastreio a muito tempo.
Varredura Monopulso
A varredura também pode ser feita pela pulsação sequencial de várias antenas secionais ou de uma grande antena como na figura abaixo. Enquanto esta técnica rende altas taxas de varredura, é preciso um hardware adicional pode excluí-lo do cenário ameaça. É geralmente encontrado em sistemas navais.
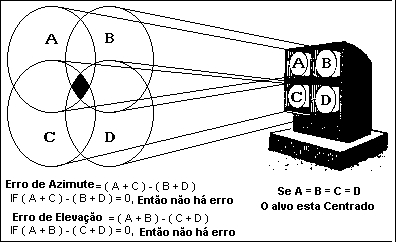
Diagrama do radar de padrão der feixe monopulso. É usada no AIM-7M Sparrow.
Receptor de Padrão de Varredura
Alguns sistemas de radares não podem varrer seus feixes transmitidos e uma antena receptora varre uma seção angular enquanto o transmissor fica no alvo o tempo todo. Para o receptor do radar, o retorno do sinal tem a mesma forma sinusoidal de uma varredura normal, mas o RWR não mostra nenhum padrão de varredura. Esta falta de varredura pode ser usada pelo processador do RWR desde que caracterize certos tipos de radares. Contudo, desde que a perda de modulação na varredura cônica signifique que o radar esteja visando no alvo, a perda de varredura não identifica o tipo de radar.
SISTEMAS DE RECEPTORES DE ALERTA RADAR
Para identificar completamente um sinal eletromagnético num ponto remoto como sendo originário de um sistema radar em uma certa localização, são necessários setes parâmetros:
1 - Frequência
2 - Largura de pulso 3 - Padrões de FRP 4 - Guiamento de Mísseis 5 - Padrão de varredura 6 - Densidade de potência (potência transmitida e largura de feixe) 7 - Ângulo de chegada (AOA)Estas "assinaturas" identificam e localizam os sistemas onde foram geradas. Desde que os parâmetros de todos os sistemas de radar sejam bem conhecidos, um receptor digital de alerta radar identifica um radar particular ao armazenar suas assinaturas conhecidas na forma digital num banco de memória para comparação com o sinal recebido. Esta é a função do processador de sinais para receber sinais desconhecidos, digitaliza-los em formato de palavras e apresentá-lo as palavras identificadoras armazenadas na memória para compatibilização. Quando uma compatibilidade é encontrada, o processador mostra um alerta alfanumérico da localização e situação da ameaça.
O sistema pode ser simplificado para mostrar apenas a banda do radar ameaça e a largura de pulso como sendo curta/longa. As ambiguidades podem ser resolvidas ao correlacionar o sinal de guiamento do míssil com o radar de controle de fogo. O padrão de varredura pode ser incluído por identificar certos tipos de radares de artilharia antiaérea. A azimute pode ser obtida para localização e a distância pelo nível de energia recebida. Se a capacidade da arma associada ao sistema de radar for conhecida ela pode ser adicionada ao mostrador. Quando a identificação esta completa ela é mostrada com simbologia apropriada num indicador de azimute. Um alerta de áudio pode ser incluído e varia de acordo com a ameaça. O resultado final e sequência de dados mostrados poderiam ter a sequência:
Banda de frequência/ Largura de pulso / padrão de FRP / Correlação com guiamento de míssil / padrão de varredura / Azimute / potência/ letalidade.
Os primeiros RWR eram direcionados para a ameaça e mostravam poucos dados, mas para exemplificar sua importância, no início da Guerra do Vietnã os primeiros ataques do SA-2 tinham 50% de eficácia. O uso de RWR e aeronaves Wild Weasel baixou a taxa para 3%.
O PROBLEMA DO CONTROLE DE DISPARO
Em um cenário imaginário, a situação internacional tem sido deteriorada e os EUA e a nação X suspenderam as relações diplomáticas. O governo da nação X vem ameaçando anexar um pequeno país fronteiriço e ameaçou qualquer país que tente para-lo. Você foi destinado a um cruzador de mísseis guiados como membro do Grupo Tarefa Zulu, atualmente estacionado a cerca de 500 km da costa do país X. O comandante do GT colocou o grupo em alerta, em todas as áreas de guerra, significando que as hostilidades são prováveis.
Você trabalha como Oficial de Ação Tática (TAO) no centro De operações de combate (COC). Dezenas de displays indicam atividades de navios e aeronaves na proximidade do GT. Como TAO, você é responsável pelo emprego dos sistemas de armas do navio na ausência do Oficial Comandante. São 02:00 e você está no comando de um sistema de armas de vários milhares de dólares e responsável pelas vidas de seus subordinados.
A calma do COC foi alterada pelo alerta do sistema de GE indicando a Detecção e Identificação de uma possível ameaça a caminho pelo sistema de MAGE. O receptor de banda larga MAGE detectou uma emissão eletromagnética vinda da direção da nação X. Quase instantaneamente os parâmetros do emissor foram interpretados pelo equipamento e comparados com os parâmetros de radar armazenados no sistema de MAGE. A informação e a simbologia indicam num vídeo a linha de direção aproximada do emissor a partir do navio. O Oficial Comandante é notificado das novidades. Enquanto isso a informação é transmitida para o resto do GT por data link de rádio.
Logo após, em outro setor do COC, o radar de busca aérea está recebendo um fraco retorno no seu alcance máximo. A informação do radar de busca aérea combina com a linha de direção no MAGE permitindo a Localização do contato e determinar a distância e direção. Mais informações continua a chegar, e o equipamento MAGE Classifica a emissão como sendo da banda J de uma aeronave de ataque da nação X que pode levar mísseis cruise anti-navio.
O contato continua a se aproximar, em direção ao GT e em minutos entrará no alcance do radar de busca e rastreio. A direção, distância e altitude do contato foi plotada para dar um curso e velocidade preciso. A resolução de distância de compressão de pulso de radar permite a determinar que o alvo é provavelmente uma aeronave. Ele é continuamente Rastreado.
Com a aproximação da aeronave do alcance máximo dos seus mísseis cruise, o operador de MAGE informa que o padrão de varredura do radar da aeronave mudou de um padrão de busca para um modo de rastreio de alvo único, indicando o lançamento iminente de um míssil. De acordo com as regras de engajamento (ROE), isto mostra uma intenção hostil e é decidido uma ação defensiva contra o ataque iminente. Você informa a equipe do COC de suas intenções e Seleciona uma arma, no caso um míssil SAM para engajar o alvo. O Comandante de Guerra Anti-Aérea da indicações das intenções hostis e ele coloca o navio e o GT em alerta aéreo vermelho, ataque em progresso.
Com a aproximação do alvo no alcance máximo do seu sistema de armas, o programa de computador de controle de fogo, usando o curso e velocidade do alvo, computa o ponto de interceptação provável (PIP) no envelope de engajamento do míssil. Esta informação e a notícia que o sistema de armas está trancado no alvo lhe é informado. Você autoriza o lançamento da bateria e o míssil é lançado em direção ao PIP. Com a velocidade do míssil em direção ao alvo é de Mach 2+, os sensores do navio continuam a rastrear a aeronave e o míssil. Comandos de guiamento são enviados para o míssil para manter o curso.
A bordo da aeronave inimiga, o piloto se prepara para lançar o míssil quando seu sistema RWR indica que está sendo engajado. O alerta vem com poucos segundos restantes pois o míssil entrou na fase terminal de guiamento. De forma desesperada para quebrar o trancamento de radar ele emprega manobras evasivas. Mas é muito tarde, com a aproximação do míssil de seu "raio letal", a espoleta de proximidade na cabeça de guerra do míssil detona e fragmentos atingem e destroem ou neutralizam o alvo. Esta informação é confirmada pelos sensores do navio. O radar continua a rastrear o alvo que cai e o MAGE fica silencioso.
O que acabou de ser descrito não é o texto retirado de uma novela naval do Tom Clancy, mas um cenário de um possível engajamento entre uma força hostil (a aeronave de ataque) e um Sistema de Armas Naval (o navio). Este cenário ilustra o conceito da sequência "detectar para engajar", que é uma parte integral do Problema de Controle de Disparo moderno. Embora o cenário fosse de um navio contra um alvo aéreo, todo sistema de armas faz as mesmas funções: detecção do alvo, localização e resolução, classificação, rastreio, seleção de armas e neutralização. Na guerra, estas funções são cumpridas por submarinos, aeronaves, tanques e mesmo fuzileiros. O alvo pode ser estacionário ou móvel, pode estar atravessando o espaço, ar, terra, mar ou sob o mar. Pode ser pilotado ou não, guiado ou não, manobráveis ou de trajetória fixa. Ele pode estar a velocidades que variam a poucos km/h a várias vezes a velocidade do som.
O temo Sistema de Armas geralmente compreendem um largo espectro de componentes e subsistemas. Estes componentes variam de um simples dispositivo, operado manualmente por um único homem, cumprindo um função específica, até um complexo arranjo de subsistemas, interconectados por computadores e sistemas de comunicações por data links que são capazes de realizar várias funções ou engajar vários alvos simultaneamente. Embora cada sistema possa ser especialmente projetado para resolver uma parte particular do problema de controle de disparo, este componente opera em coordenação que permite que todo o sistema atinja a meta final - a neutralização do alvo.
Componentes
Todos os sistemas de guerra naval, considerando os meios em que operam ou o tipo de armas que empregam, consiste de componentes básicos que permitem ao sistema detectar, rastrear e engajar o alvo. Os sensores componentes também devem ser capazes de dar conta de várias características do alvo, incluindo distância do alvo, direção, velocidade, tamanho e aspecto.
Detectando o Alvo
Existem três fases envolvendo a detecção do alvo por um sistema de alvo. A primeira fase é a vigilância e detecção, o propósito dos quais é vigiar uma área determinada por um alvo e detectar sua presença. Isto pode ser cumprido ativamente, ao emitir energia no meio e esperar por uma reflexão de energia de volta, como um radar, ou pela recepção de energia pelo alvo como o MAGE do cenário acima. A segunda fase é medir ou localizar a posição do alvo mais precisamente e por uma série de medidas estimadas pelo seu comportamento ou movimento relativo do próprio navio. Isto é cumprido determinando-se repetitivamente a distância, direção e profundidade ou elevação do alvo.
Finalmente, o alvo deve ser classificado, seu comportamento deve ser interpretado para estimar seu tipo, número, tamanho e mais importante ainda, identificá-lo. A capacidade dos sensores de armas são medidas pelo alcance máximo em que podem detectar um alvo e sua capacidade de distinguir alvos individuais em um grupo multi-ameaça. Além disso, os subsistemas sensores devem ser capazes de detectar alvos no meio de retornos com ruídos, que é a energia sentida que não seja do alvo. Estes ruídos ou clutter estão sempre presentes no ambiente devido a reflexões da chuva ou superfície da terra ou como resultado da interferência deliberada de radar ou comunicações. Ele também é gerado pelos circuitos internos do meio de detecção.
Rastreando o Alvo
Sentir a presença do alvo é o passo inicial e essencial para a o problema do controle de disparo. Para engajar com sucesso o alvo e resolver o problema, a atualização da posição do alvo e sua velocidade relativa para o sistema de armas deve ser conhecido ou continuamente estimada. Esta informação é usada para avaliar a ameaça representada por um alvo e para predizer a posição futura do alvo e um ponto de interceptação da arma onde a arma pode ser controlada e apontada precisamente.
No sentido de obter informações da trajetória do alvo, vários métodos foram imaginados para permitir que o sensor siga ou rastreio o alvo. Este controle ou pontaria pode ser feito por um conjunto de motores e sensores de posicionamento chamados sistemas de servo. Inerentes ao processo de servo é o conceito de feedback. No geral, o feedback fornece ao sistema a diferença entre onde o sensor esta apontado e onde o alvo esta realmente. Esta diferença é chamada erro de sistema. O sistema então toma o erro e numa série de meios eletromecânicos move o sensor e/ou sistema de armas na direção apropriada e numa razão onde este erro é reduzido. Esta é a meta de um sistema de rastreio para reduzi-lo a zero. Isto não é possível na prática então quando o erro é mínimo o sensor é dito como estando "no alvo".
A posição do sensor e lançador são tipicamente determinados pelos meios que são usados para converter movimento convencional em sinais elétricos. Transformadores sincrônicos e codificadores óticos são geralmente usados no sistema de servo para detectar a posição e controlar o movimento dos direcionadores e indicar meios. Os direcionadores então movimentam a antena de radar, canhão e lançadores de mísseis.
O cenário apresentado no início é uma resposta a um único alvo. Na prática, este é um caso raro. O campo de batalha moderno onde os sensores detectam vários contatos, amigos ou hostis, e a informação são continuamente coletada por todos eles. Os computadores modernos permitem aos sistemas de armas e a seus computadores a compilar, coordenar e avaliar os dados e então iniciar uma resposta apropriada. Computadores permitem que um sistema de armas detecte, rastreia e faça a predição do movimento do alvo automaticamente. Ele estabelece a presença do alvo e define como, quando e com que arma o alvo deve ser engajado.
Engajando o Alvo
O engajamento e neutralização efetiva de um alvo requer que um mecanismo destrutivo, no caso de uma cabeça de guerra, seja levada até a proximidade do alvo. O quão próximo a cabeça de guerra deve chegar do alvo depende do tipo de cabeça de guerra e o tipo de alvo. Ao lançar uma cabeça de guerra, a pontaria, lançamento e tipo de sistema de propulsão da armas, e as forças em que armas está sujeita são parâmetros durante o caminho para o alvo que devem ser considerados.
A capacidade da arma de ser guiada ou controlada após o lançamento aumenta dramaticamente sua precisão e probabilidade de destruição de um único disparo(SSKP - single shot kill probability). O uso de sistemas de guiamento também complica o projeto do sistema. Estes fatores e o explosivo a ser usado, o mecanismo de espoleta/detonação e o projeto da cabeça de guerra são os fatores no projeto e eficiência das armas modernas.
O radar (Radio Detection and Ranging) é empregado de várias formas, de complexas redes de defesa aérea até um simples IFF e altímetros. A ameaça de radar primária das aeronaves é o radar de controle de fogo associado a armas, principalmente mísseis guiados.
Radares de Rastreio de Alvo (Target Tracking Radars - TTR)
Antes de entender a guerra eletrônica é necessário conhecer os princípios dos radares de rastreio/acompanhamento de alvos. A ênfase será nos radares de pulso por serem os mais usados. Os radares de onda contínua (CW) são descritos em outra seção.
Um radar de controle de fogo consiste basicamente de um transmissor, um receptor, uma antena, um mostrador/display e um computador capaz de rastrear o alvo (predizer a localização do alvo num tempo futuro baseado nos parâmetros de vôo em o radar pode ser mover para se manter apontado para o alvo). Para realizar esta função, o radar deve medir a azimute, elevação e distância e a razão de mudança de cada um (figura abaixo).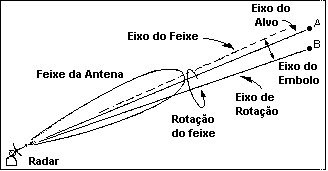
Movimento do feixe do radar para determinar a localização angular e a razão de mudança.
Radares de Pulso
Já foram discutidos anteriormente. São os mais usados pois a razão S/N inerente em operações que minimizam a necessidade de alta potência. Contudo, devido a reduzida vulnerabilidade dos radares CW, a maioria dos sistemas estão usando CW.
Radares CW
Os TTR CWI são desejáveis para duas técnicas de contra contramedidas eletrônicas (CCME) - Coerência e home-on-jam. Uma onda contínua pode ser modulada por um sinal de frequência muito baixa. Se uma modulação de 85 Hz é usada, o período de um ciclo é de cerca de 3500km. Então, num envelope normal de SAM, a fase de 85 Hz irá ser mudada muito pouco pela ida e volta. O transmissor e o receptor de sinal estarão em coerência de fase.
Esta modulação é chamada de sinal COHO. Qualquer sinal, incluindo os sinais de interferência, deve ser coerente para passar pelo receptor do radar. Desde que a fase COHO pode ser alterada randomicamente, as CME ativas serão negadas como um sistema operacional.
O míssil guiado recebe o sinal transmitido - com COHO - na antena traseira e no refletor Doppler - com COHO - na antena frontal. Quando os dois COHO estão em fase, o míssil identifica o alvo correto.
Se o alvo tenta interferir no TTR, o míssil irá ver esta interferência na antena frontal que está trancada no alvo. Se a interferência não estiver coerente, o trancamento COHO será rejeitado. Como alternativa, o míssil pode mudar para o modo home-on-jam (HOJ) e rastrear o sinal de interferência até o alvo. Feito isto, devido a capacidade COHO do CWI, os alvos gerando CME podem ser um beacon altamente direcionais para o míssil.
Pode-se notar que um raio CW puro conduz muito pouca informação até o míssil. Como já discutido, os sinais anti-jaming podem modular a amplitude do CW, códigos de identidade radar-míssil podem realizar modulação da frequência, uma aproximação de alcance pode ser determinada de um declive onde o sinal FM e modulação de fase podem ser usadas como um meio CCME. Então, o display analisador de espectro de um sinal real de SAM CW mostrara o complexo AM - FM - FM - PM de onda contínua. Para um pulso Doppler, como os radares aerotransportados Pulso-Doppler (AIPDs), o mesmo sinal deve ser interrompido periodicamente para a transmissão de vários pulsos ordenados ou em grupos(stagger, jitter ou ambos).
Sistema de controle de tiro por onda contínua (CW).
Outros radares
Qualquer rede de defesa aérea é composta de muitos radares além dos destinados para controle de disparo de armas. Exceto para artilharia antiaérea e interceptação aérea, estes radares são caracterizados pela frequência muito baixa, feixes de radar largos e falta de capacidade de rastreio automático. Os radares destes grupos são de aquisição, alerta antecipado, medidores de altura, controladores de interceptação aérea e terrestre (GCI e CGA).
- Radares de Alerta Antecipado. Devido à necessidade dos radares de controle de fogo precisarem de um pequeno raio para localização acurada, eles dependem de outros radares para detecção e localização. Os radares de alerta antecipado tem baixa freqüência (100-1000Hz), raios largos (6-16 graus), longo alcance (>350km) e são capazes de fazer busca de 360 graus de azimute para detecção inicial do alvo. As contramedidas eletrônicas não fazem o alvo desaparecer e apenas ajudam esses radares com o efeito beacon do transmissor de interferência. Embora estes radares empregam técnicas AGC e MTI, eles não representam nenhuma ameaça real as aeronaves por não serem capazes de guiar com precisão nenhuma arma.
- Radares de Aquisição. Após os radares de AEW detectarem o alvo, os radares de aquisição irão localizar a posição para rastreadores de pequeno raio. Estes radares tem raios médios (3-6 graus), média freqüência (800-8000Hz) e nenhuma capacidade de rastreio automático. Eles buscam um segmento de azimute determinado pelo radar EW. Devido a similaridade destes radares com os de controle de fogo, eles podem ser interferidos pela mesma técnica e. Ao negar as coordenadas para os radares de mísseis SAM, o radar de aquisição será forçado a realizar aquisição manual e aumentar o tempo de aquisição. Em alguns sistemas, a perda da aquisição resulta na rejeição do rastreio.
- Radares de Medição de Altura. Os sistemas de medição de altura para fornecerem dados El para os dados de azimute do alvo para radares de alerta antecipada e de aquisição. Estes radares têm uma característica muito similar com os radares de aquisição exceto que a menor dimensão do seu raio será vertical para melhor resolução El.
- Radares de Interceptação Controlada do Solo (Ground Controlled Intercept - GCI). Estes sistemas são compostos de radares de aquisição e medidores de altura. São usados para vetorar aeronaves interceptadoras contra uma força intrusa.
- Radares de Aproximação Controlada do Solo (Ground Controlled Approach - GCA). Estes radares têm parâmetros similares dos GCIs, de aquisição e de Medição de altura. Eles diferem na unidade de display. O mostrador GCA é marcado com os ângulos de vôo/planeio do local. As contramedidas eletrônicas podem ser usadas para forçarem as aeronaves a usarem a aproximação visual.
- Radares de Artilharia Anti-Aérea(AAA). Os radares de controle de fogo de AAA operam do mesmo modo dos mísseis TTR onde, após a aquisição do alvo, o rastreio automático é feito pelo computador do radar e outras formas de varredura. Para manter a alta mobilidade necessária para um sistema de canhão, o radar tem uma antena pequena com raio médio (1-5 graus) e alta freqüência (800 MHz a 20 GHz) com varredura cônica.
- Radares de Interceptação Aérea (AI). Estes radares(AI) são usados para guiamento de mísseis de interceptação aérea (AIM). O operador na cabine adquire manualmente o alvo ao direcionar a antena. O rastreio automático é feito pelo mesmo método do rastreio Doppler.
- Radares de Defesa Terminal. Os radares de defesa terminal são radares de controle de fogo de SAM e AAA. Já foram discutidos.
- Radares de Aeronaves de Combate. Os radares de caça operam entre 8-12GHz banda I e parte baixa da banda J - 10-20 GHz. Acima de 12GHz ocorrem aumenta das perdas pela absorção do vapor d'água atmosférico. A banda Ku(12-18 GHz) fornece alta resolução para mapeamento de terreno. Os radares de caça utilizam o PRF para busca. O PRF médio é bom para olhar para baixo com diminuição do alcance. Alto PRF é bom para alvos voando baixo e se aproximando.
Os radares têm modos ar-ar e ar-solo:
Modos AA:
- Lock-down. Procura alvos voando baixo.
- Look-up. Procura alvos voando alto. - Rastreio de alvo único - o radar é apontado para um alvo e só ele aparece na tela. - TWS - neste modo ele gasta 10 s para o radar varrer cada alvo. - Alcance-enquanto-busca - usa FRP médio para alcance e FRP alto para busca a longa distância. - Busca de velocidade - usa alto FRP para busca a distâncias extremas. Fornece dados de velocidade e azimute. - Avaliação de incursão. Usado para discernir aeronaves voando próximas - Combate aéreo - modo de curto alcance contra aeronaves manobrando. O padrão pode ser fixo ou mover-se para antecipar manobras do alvo. Ex. HUD, boresight e busca vertical. - HUD - o radar busca o campo de visão do HUD e trava no alvo mais próximo. - Boresight - o radar aponta o feixe diretamente a frente da aeronave e o piloto aponta para o local desejado. - Busca vertical - usado se a aeronave esta manobrando verticalmente. - Telemetria ar-ar.Modos AG:
- Telemetria AG - usado para medir a distância para onde a aeronave está apontado para pontaria de canhões e CCIP. - Mapeamento do terreno. Varrendo o feixe de um lado ao outro, o radar cria uma imagem de radar do terreno a frente. Pode ser usado para localizar e atacar alvos em terra ou para atualizar o sistema de navegação. - Busca marítima. Otimizado para detectar e rastrear navios. A superfície marítima se move e tem que ser discriminada do alvo. - Congelamento. O radar mapeia uma área e congela a imagem que pode ser usada por um tempo até outra "foto". - Feixe expandido. Permite o zoom de uma área da imagem do radar selecionada. - Feixe Doppler aguçado. Usado para imagens de altíssima resolução mas apenas a 15 graus a frente do radar. - Evitamento do terreno. Detecta o terreno a frente e permite que o piloto evite. - Seguimento do terreno. Mantém a aeronave voando numa altitude selecionada em relação ao solo. - MTI (indicação de alvos móveis). O radar separa alvos móveis dos retornos do solo. Esta capacidade reduz com o aumento da velocidade da aeronave.
Nenhum comentário:
Postar um comentário